Хуссен Гареб
Локальная сеть контроллера (CAN) идеально подходит для многих промышленных протоколов высокого уровня. Его стоимость, производительность и возможность обновления обеспечивают огромную гибкость при проектировании системы.
В этой статье кратко представлены принципы работы шины CAN, реализация основной сети шины CAN и способы устранения неполадок в этой сети.
Протокол шины CAN
Шина CAN представляет собой систему широковещательной передачи сообщений с несколькими мастерами, которая определяет максимальную скорость передачи сигналов 1 м бит в секунду (бит / с).
В отличие от традиционной сети, такой как USB или Ethernet, CAN не отправляет большие блоки данных точка-точка от узла A к узлу B под контролем ведущего устройства центральной шины.
В сети CAN множество коротких сообщений, таких как температура или частота вращения, передаются по всей сети, что обеспечивает согласованность данных в каждом узле системы.
Протокол CAN с моделью OSI
CAN – это шина последовательной связи, определенная Международной организацией по стандартизации (ISO), первоначально разработанная для автомобильной промышленности для замены сложного жгута проводов двухпроводной шиной.
Протокол связи CAN, ISO 11898, описывает, как информация передается между устройствами в сети, и соответствует модели взаимодействия открытых систем (OSI), которая определяется в терминах уровней.
Фактическая связь между устройствами, подключенными к физической среде, определяется физическим уровнем модели. Архитектура ISO 11898 определяет два нижних уровня семиуровневой модели OSI/ISO как уровень канала передачи данных и физический уровень. Как показано на рис. (1)
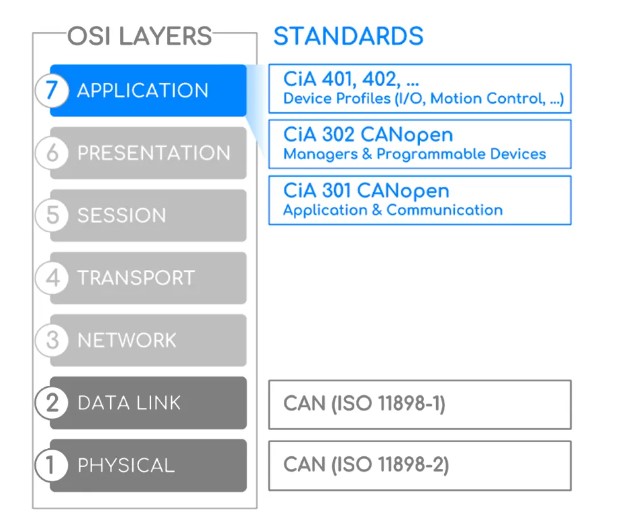
Прикладной уровень устанавливает канал связи с протоколом верхнего уровня, специфичным для конкретного приложения, таким как независимый от поставщика протокол CAN open. Этот протокол поддерживается международной группой пользователей и производителей CAN in Automation (CIA).
Существует множество подобных протоколов, предназначенных для конкретных приложений, таких как промышленная автоматизация или авиация.
Примерами стандартных в отрасли протоколов на основе CAN являются the CAN Kingdom от KVASER, Device Net от Allen-Bradley и интеллектуальная распределенная система (SDS) Honeywell.
Основные моменты для создания сети CAN
– Протокол CAN определяет уровень канала передачи данных и часть физического уровня в модели OSI.
- Каждый блок CAN, подключенный к шине, можно назвать узлом. Все блоки CAN подключены к шине, оканчивающейся на каждом конце резисторами 120 Ом, для формирования сети.
- Шина CAN состоит из двух проводов (линий CAN_H и CAN_L).
- Контроллер CAN определяет уровень шины на основе разницы в уровне мощности на обоих проводах.
- Уровни шины делятся на доминирующий и рецессивный уровни, который должен быть одним из них, отправитель отправляет сообщение получателю, внося изменения на уровне шины.
- В доминирующем состоянии напряжение CAN_H составляет около 3,5 В, а напряжение CAN_L составляет около 1,5 В. В рецессивном состоянии напряжение обеих линий составляет около 2,5 В.
- Сигнал дифференциальный, поэтому CAN обладает надежной помехоустойчивостью и отказоустойчивостью. Сбалансированный дифференциальный сигнал снижает помехоустойчивость и обеспечивает высокую скорость передачи сигналов по кабелю витой пары. Ток в каждой сигнальной линии одинаков, но в противоположном направлении, что приводит к эффекту подавления поля, что является ключом к снижению уровня шума. Использование сбалансированных дифференциальных приемников и кабелей с витой парой повышает подавление синфазных сигналов и высокую помехоустойчивость шины CAN.
Соотношение между скоростью и расстоянием между кабелями
Шина CAN – это шина, которая соединяет несколько устройств одновременно. Теоретически нет ограничений на общее количество подключаемых устройств. Однако на практике количество подключаемых устройств ограничено временной задержкой на шине и электрической нагрузкой.
Уменьшите скорость передачи данных, увеличьте количество подключаемых устройств и увеличьте скорость передачи данных, количество подключаемых устройств уменьшается.
Расстояние связи обратно пропорционально скорости связи, и чем дальше расстояние связи, тем меньше скорость связи. Большее расстояние может составлять 1 км или более, но скорость составляет менее 40 к / с.
Ресурсы
Введение в Controller Area Network (CAN) от Texas Instruments.
instructables.com/A-Simple-Tutorial-for-CANBUS